اخیراً، یکی از دوستان مشتری JSR یک پروژه جوشکاری مخزن تحت فشار رباتیک را سفارشیسازی کرد. قطعات کار مشتری مشخصات مختلفی دارند و قطعات زیادی برای جوشکاری وجود دارد. هنگام طراحی یک راهحل یکپارچه خودکار، لازم است تأیید شود که آیا مشتری جوشکاری متوالی انجام میدهد یا جوشکاری نقطهای و سپس به طور کامل از ربات استفاده میکند. در این دوره، متوجه شدم که او در مورد انتخاب موقعیتیاب شک دارد، بنابراین JSR به طور خلاصه آن را به همه معرفی کرد.
موقعیتیاب عمودی تکمحوره و تکمحوره دو ایستگاهه
موقعیتیاب عمودی سه محوره VS
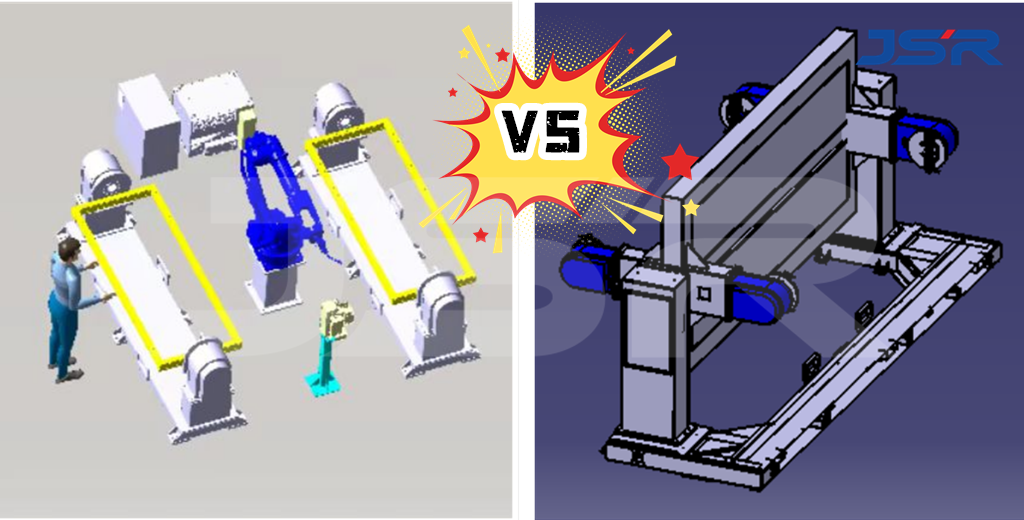
در ایستگاه کاری جوشکاری ربات، موقعیتیاب عمودی تکمحوره و دمچرخه دو ایستگاهه و موقعیتیاب عمودی سهمحوره دو تجهیزات موقعیتیابی رایج هستند و در سناریوهای کاربردی مختلف مزایای خاص خود را دارند.
سناریوهای کاربردی و مقایسههای آنها در زیر آمده است:
موقعیتیاب تکمحوره دو ایستگاهه سر و دم:
این دستگاه برای سناریوهایی مناسب است که در آنها قطعه کار در طول فرآیند جوشکاری نیاز به چرخش و قرارگیری دارد. به عنوان مثال، در خط تولید جوشکاری بدنه خودرو، میتوان دو قطعه کار را همزمان در دو ایستگاه نصب کرد و چرخش و قرارگیری قطعات کار را میتوان از طریق یک موقعیتیاب تک محوره سر و دم دستی انجام داد و در نتیجه راندمان تولید را بهبود بخشید.
https://youtube.com/shorts/JPn-iKsRvj0
موقعیت یاب فلیپ عمودی سه محوره:
ایدهآل برای سناریوهای جوشکاری پیچیده که نیاز به چرخش و برگرداندن قطعات کار در جهات مختلف دارند. به عنوان مثال، در صنعت هوافضا، جوشکاری پیچیده بدنه هواپیما مورد نیاز است. موقعیتیاب عمودی سه محوره میتواند چرخش و برگرداندن چند محوره قطعه کار را در جهات افقی و عمودی انجام دهد تا نیازهای جوشکاری در زوایای مختلف را برآورده کند.
https://youtu.be/v065VoPALf8
مقایسه مزایا:
موقعیتیاب تکمحوره دو ایستگاهه سر و دم:
- ساختار ساده، آسان برای کار و نگهداری.
- برای بهبود راندمان تولید، میتوان دو قطعه کار را همزمان پردازش کرد.
- مناسب برای برخی از کارهای جوشکاری سادهتر، مانند قطعات کاری که نیاز به یک محور چرخش دارند.
- قیمت آن ارزانتر از موقعیتیاب عمودی سه محوره است.
- جوشکاری بین ایستگاههای چپ و راست جابجا میشود. هنگام جوشکاری در یک ایستگاه، کارگران باید مواد را در طرف دیگر بارگیری و تخلیه کنند.
موقعیت یاب فلیپ عمودی سه محوره:
- این دستگاه میتواند چرخش و چرخش چند محوره را انجام دهد و برای کارهای جوشکاری پیچیده مناسب است.
- در حین جوشکاری ربات، کارگران فقط باید بارگیری و تخلیه قطعات کار را از یک طرف انجام دهند.
- انعطافپذیری و دقت موقعیتیابی بیشتری را فراهم میکند که میتواند الزامات زوایای مختلف جوشکاری را برآورده کند.
- مناسب برای قطعات کاری با کیفیت جوشکاری بالا و الزامات دقت.
به طور خلاصه، انتخاب یک پوزیشنر مناسب به الزامات خاص کار جوشکاری، از جمله عواملی مانند پیچیدگی قطعه کار، زاویه جوشکاری، راندمان تولید و الزامات کیفیت جوشکاری بستگی دارد.
زمان ارسال: 20 فوریه 2024
